共计 1253 个字符,预计需要花费 4 分钟才能阅读完成。
随着计算机技术的发展,通过有限元对汽车结构件进行强度和疲劳的分析已经是车辆开发过程中的必要环节。那么获得零部件在车辆行驶过程中的载荷历程,则是疲劳分析计算的必备前提。
基于六分力的半分析法![]()
该方法需要采集物理样车在试车场按试验规范行驶时的轮心六分力,以此为激励驱动模型进行仿真分析,同时,对弹簧、减震器等零部件安装传感器并标定,采集时域信号用于后续载荷分解对标。



施加轮心载荷的多体动力学模型及载荷分解
虚拟迭代技术![]()
该技术通常用于衍生车型开发,通过采集上一轮车型的轮心加速度、弹簧减震器位移、球头载荷等信号作为目标,反向推导轮心输入,用于驱动动力学模型。
当然,轮心驱动的反向推导,并不是对六向力进行全部推导,通常只推导出轮心垂向位移用于取代轮心垂向载荷,而保留其它方向载荷。主要原因是考虑同一平台开发的车型在相同路面高频上的动态响应是接近的。


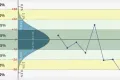
迭代过程图

对于不同白噪音输入的输出收敛情况

模拟信号与试验信号对标情况
虚拟路面技术![]()
实现虚拟路面分析有几项关键技术:柔性轮胎模型、3D数字路面、驾驶控制模型。
柔性轮胎模型:轮胎与地面的接触是非常复杂的力学行为,当前应用的是FTire轮胎模型,是一种可以通过轮胎与路面的摩擦特性试验、胎体变形等本体特性实验获得的动力学模型。试验中需要识别轮胎的结构参数、刚度参数、模态参数以及稳态滑移参数。

轮胎静态特性

轮胎动态特性
同时,FTire模型必须在Cleat凸块及比利时方块路面上完成验证试验。

Cleat凸块试验

比利时石块路试验
3D数字路面:基于实际试车场的道路模型,需要应用3D道路测量系统激光扫描路面,将复杂的耐久路面(如比利时、方坑、扭曲等路面)进行复制,逆向建立路面模型。
 、
、
3D道路测量系统

路面点云滤波检查

3D数字路面模型
驾驶控制模型:以试验采集的路面轨迹为目标,通过方向盘转角来进行偏差修正,对车辆模型进行驾驶行为控制。

速度&轨迹误差反馈控制

ADAMS PID轨迹速度控制方法
反之,其余两种方式可以保证轮心载荷的准确性,但是项目早期并不具有采集路谱的工程车辆,工程研究不利于项目开发进度。同时,也需要耗费大量的人力、物力及时间成本。后期车辆状态的频繁更改,采集数据也不现实,此时虚拟路面技术则具有巨大的项目优势。
文章转自:智享汽车圈








 透彻理解卡方检验 - 汽车质量管理笔记
[…] 化简后的式子是我们在卡方检验中需要用到的式子,所以请大家牢记!对于上述式子有疑惑的读者可以学习基础的概率论,也可以参考我之前写的一篇关于独立的文章(《【直观数学】如何理解两事件间的独立关系》)。如果没有问题的话,我们可以进入到卡方检验原理与步骤的主体介绍部分! […]
透彻理解卡方检验 - 汽车质量管理笔记
[…] 化简后的式子是我们在卡方检验中需要用到的式子,所以请大家牢记!对于上述式子有疑惑的读者可以学习基础的概率论,也可以参考我之前写的一篇关于独立的文章(《【直观数学】如何理解两事件间的独立关系》)。如果没有问题的话,我们可以进入到卡方检验原理与步骤的主体介绍部分! […]
 infinite cui
需求VDA6.3 表格,谢谢
infinite cui
需求VDA6.3 表格,谢谢
 大师兄
说的挺有道理的,从现实看到的大部分情况,做技术的人都比较直,对技术的一丝不苟,容易在遇到需要展现管理能力的时候,就会表现出短板来。管理需要授权,更多应该思考团队、部门间,人员发展,对未来的变化做出应对等的能力。
大师兄
说的挺有道理的,从现实看到的大部分情况,做技术的人都比较直,对技术的一丝不苟,容易在遇到需要展现管理能力的时候,就会表现出短板来。管理需要授权,更多应该思考团队、部门间,人员发展,对未来的变化做出应对等的能力。
 john
如何获得这个PPT文件
john
如何获得这个PPT文件